

Description
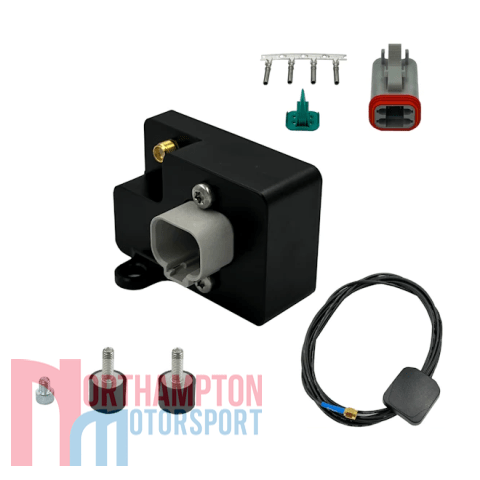
ECUMaster GPS to CAN module (v2) is a device designed to provide position information over CAN bus. This module can use combination of different navigation systems (GPS, GLONASS, BeiDou, Galileo) as well as IMU (Inertial Measurement Unit) to provide position updates at a rate of 25Hz.
Position data can be used to measure lap times, estimate current lap time, draw track maps and analyse vehicle logs with respect to track position.
This GPS To CAN Module is also available with an Autosport connector. Please see our other listing ECUMaster GPS to CAN Autosport for more information
ECUMaster GPS To CAN Module (v2) Specification:
General
- Operating supply voltage: 6-22 V, immunity to transients according to ISO 7637
- Reverse polarity protection: Yes, internal up to 16 V
- Temperature range: -40 to +85 °C
- Enclosure: IP65, bespoke CNC machined aluminum
- Size: 66 x 53 x 44 (mm)
- Weight: 92 grams
- Connector:
- Plug: DEUTSCH DT06-4S
- Socket: DEUTSCH DT15-4P
- CAN-bus bitrate: 1 Mbps, 500 kbps, 250 kbps, 125 kbps
- PC communication: Using USB to CAN interface (ECUMaster USB to CAN, PEAK, Kvaser)
- LED Colours:
- Red: No position fix
- Green: Position fix ready
Navigation
- Supported systems: GPS, GLONASS, BeiDou, Galileo
- Supported antennas: Active
- Update frequency: 25 Hz
- IMU update frequency: 200 Hz
- Velocity accuracy: 0.05 m/s
- Velocity maximum: 500 m/s
- Velocity resolution: 0.01 m/s
- Velocity latency: < 20 ms
- Position accuracy: 2 m
- Height accuracy: 2.5 m
- Heading accuracy: 0.3°
- Heading resolution: 0.01°
- Acquisition:
- Cold starts: 24 sec
- Hot Start: 2 sec
Download Files

GPS to CAN User Manual
GPS to CAN (v2) Technical Drawing
Estimated dispatch time within 3 working days.
Picture for illustration purposes only. Actual parts may differ slightly in appearance.